You are here
Sonar Interface
ACOUSTCS HOME PEOPLE COVIS PROJECTS SOFTWARE & DATA PUBLICATIONS NEWS LINKS
Research dives in deep oceans are costly, hence researches look to make the most efficient and optimal use of research equipment. Thus they have to obtain as much data as they can. One of the most important means of data acquisition is the Sonar system. There is a need for a real-time sonar interface capable of controlling the sonar instrumentation at the seafloor, performing on-the-fly 3D analysis and archiving resulting data. Researchers can only view 2D images of the sonar scan in real time. Although some aspect of data quality (s/n ratio and major artifacts) are easy to judge using 2D images, inferring the actual shape of the object being scanned can be a challenging task in the 2D realm. Currently 3D reconstruction and analysis is done offline using archived data.
Developments in graphics hardware have made it possible to view a full 3D reconstruction of the 2D scans in near real-time. This integration of the 3D rendering functionality with the 2D control system will help researchers in analyzing the quality of data acquired in near real-time. An in-built archiving system which provides seamless integration with the sonar rendering and controls is hoped to improve the efficiency of current research process.
In this Sonar Interface developed at Rutgers University, Data, presentation and interaction are separated, facilitating a modular system structure. Since all communication takes place via a single point (model) pluggability is achieved (modules can be added and removed from the system without changing code in other modules of the system.) A central communication point also facilitates easy code maintenance.
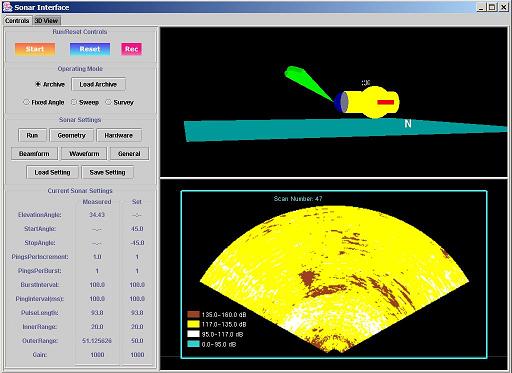
The Sonar Interface
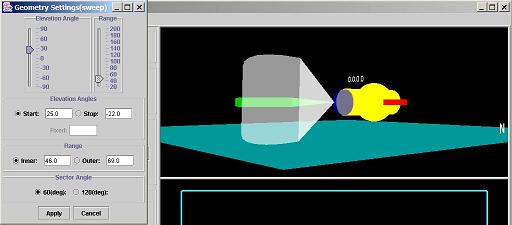
The 3D Virtual model of the ROV is a useful tool when setting ping parameters. It also provides feedback about the spatial information of the system.
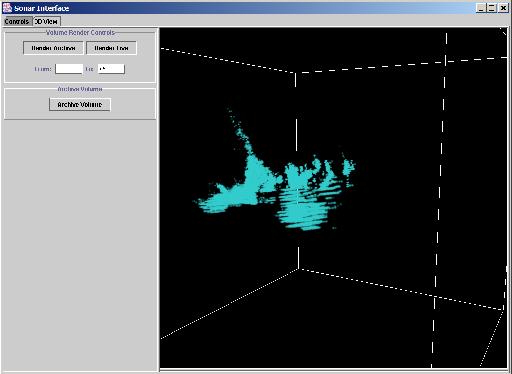
The user can render live data from the buffer or view archived volume data in the .VOL format. .VOL format contains the intensity image of each ping along with its elevation angle and dimensions (Does not contain the final volume data so as to facilitate further processing of the ping image in future implementations). The user can convert raw data files (.RAW) to (.VOL) format through the interface and can also navigate the volume, Change viewing vector, zoom in and zoom out. Volume color and threshold values can be set in the General Settings dialog box.
For further information on the Sonar Interface please email: Karen Bemis (bemis@rci.rutgers.edu)